Current situation
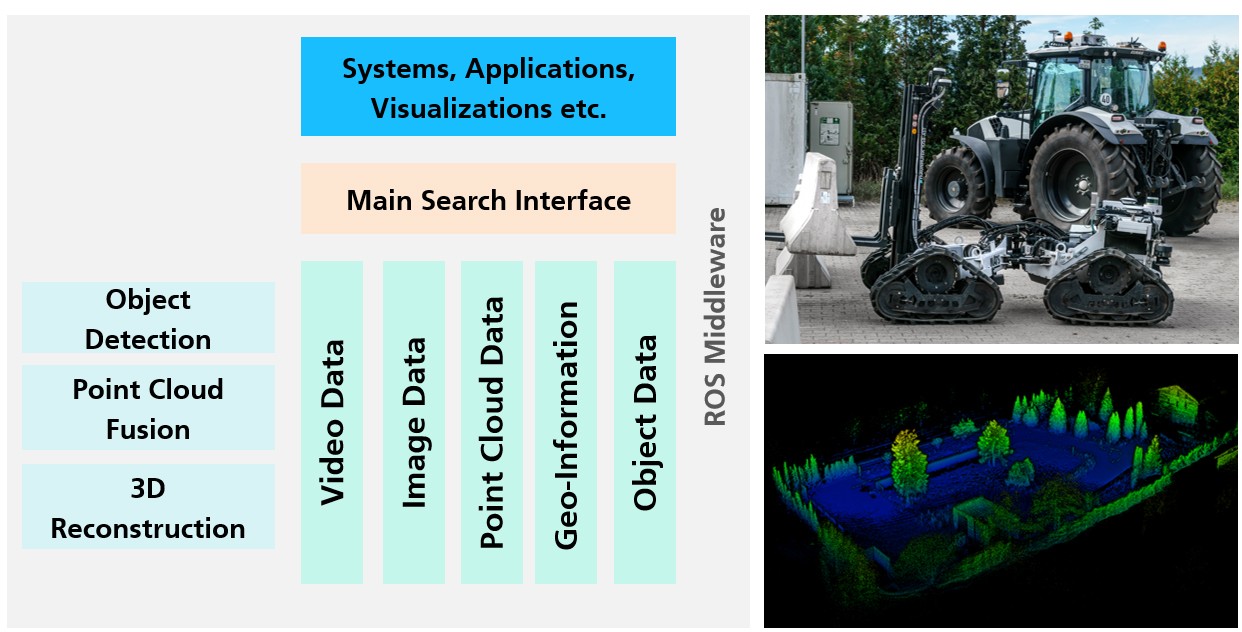
Mobile autonomous systems make it possible to capture their environment using various sensors. The data collected include 3D point clouds, images and videos, and resulting oject detections. Ensuring that these kinds of data do not remain siloed on individual systems requires efficient exchange and storage mechanisms. In this way, the data can be made available and usable in a standardized way so they can contribute to a holistic description of the existing situation. The internally financed MUSAL research project is dedicated to the challenge of conceptualizing and implementing this kind of structure.
Objective of MUSAL
MUSAL´s goal is thus to ensure seamless cooperation between different systems in a broad array of project contexts. This is achieved by exchanging and further processing relevant data and using this information to optimize the way the situation is presented. Beyond that, the project also aims to give operators a full overview with expanded options for accessing historical information from all systems, thereby laying a solid foundation for decision making.
Approach
Toward this end, a distributed information system with specific data sinks, defined interchange formats, and overarching search function was created as part of MUSAL. In addition to sensor data, prior knowledge and geoinformation can also be leveraged effectively. Containerized services make the software that was developed readily deployable. It also provides services such as point cloud fusion and generation of point clouds from image data in central location.