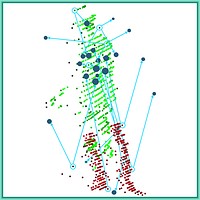
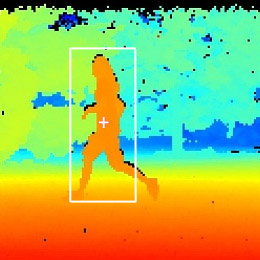
Bei der 3D-Objekterkennung und dem Tracking detektierter Objekte liegt ein Forschungsschwerpunkt der Gruppe auf der Verwendung von 360°-scannenden LiDAR-Sensoren im mittleren Entfernungsbereich (ca. 2 m bis 100 m) zur fahrzeugbezogenen Gefahrenerkennung. Beispiele sind die Gefährdungsanalyse durch Detektion und Bewegungsverfolgung von Personen im eigenen Fahrzeugumfeld oder die Detektion kleiner dynamischer Objekte wie Mini-UAVs (Drohnen, Quadrocopter). Die ortsgenaue Detektion in den 3D-Daten wird auch dazu verwendet, höherauflösende Sensoren zum Tracking und zur weiteren Analyse auf Objekthinweise auszurichten.