


Motivation
Die präzise Vermessung von Gewässern wie Flüssen oder Baggerseen stellt eine anspruchsvolle Aufgabe dar. Behörden und private Hafenbetreiber sind verpflichtet, ein Verzeichnis von aktuellen Karten wie z. B. Flussbetten oder Hafenanlagen zur Verfügung zu stellen. Gewöhnlich wird eine Vielzahl von Kartierungsschiffen und geschultes Personal für diese Aufgabe benötigt. Dies ist jedoch kostenintensiv, weshalb in vielen Fällen die Kartierung zu selten durchgeführt wird. Eine Lösung hierfür bieten unbemannte Wasserfahrzeuge (engl. autonomous surface vessels, ASV), welche die Kosten und den Bedarf an Bordpersonal erheblich reduzieren.
Projektergebnis
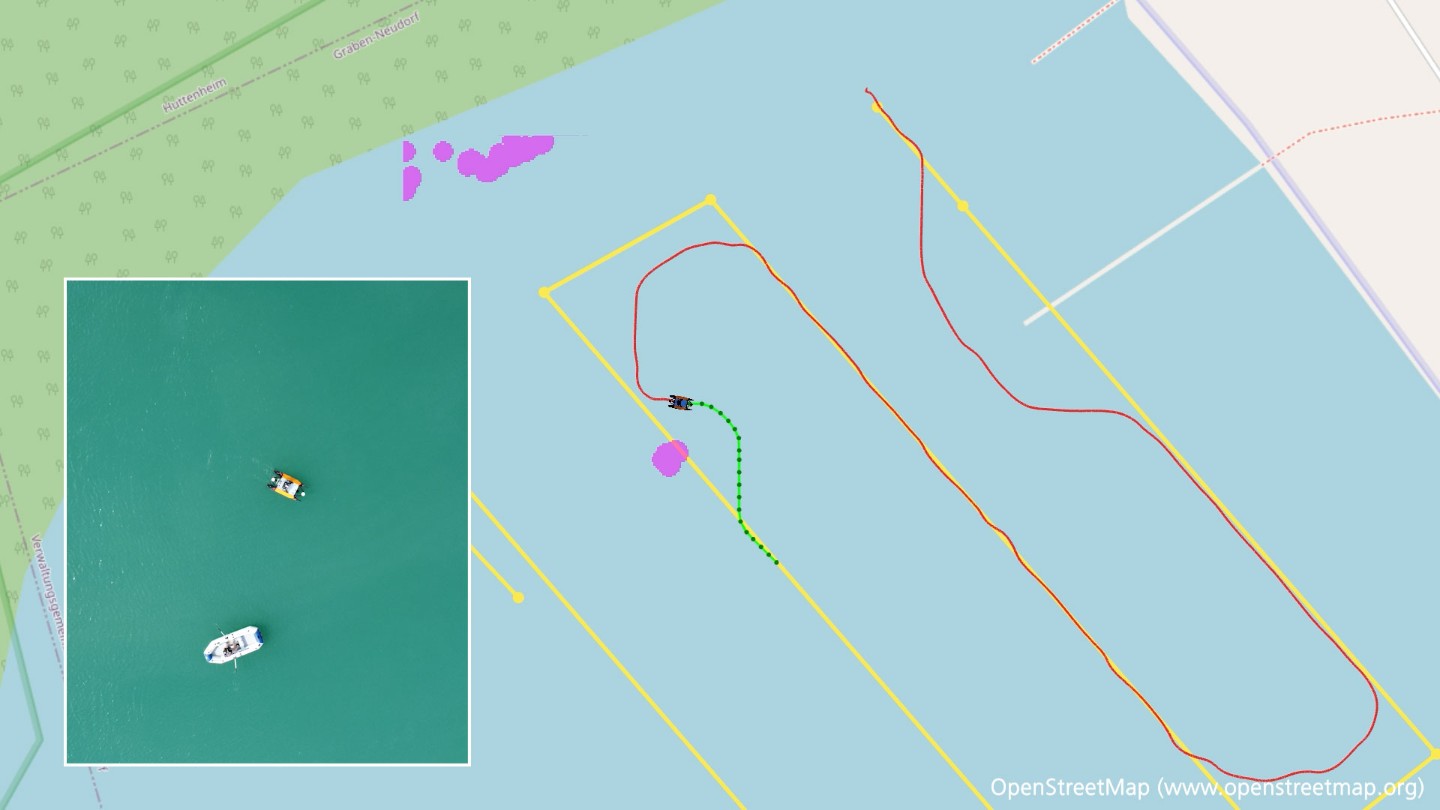
Das Fraunhofer IOSB hat im Rahmen eines dreijährigen Eigenforschungsprojekts ein autonomes Oberflächenfahrzeug entwickelt, welches in der Lage ist, eigenständig ein Gewässer zu vermessen, um eine zugehörige 3D-Karte zu erzeugen. Hierfür werden sowohl die Gewässersohle mittels eines Sonars als auch Uferbereiche und Überwasserstrukturen mittels optischer Systeme erfasst. Die so gewonnenen Informationen werden anschließend fusioniert und in ein gemeinsames 3D-Modell der Umgebung überführt.
Exemplarische Anwendungsfälle
Die gewonnenen Erkenntnisse aus dem Projekt können vielseitig angewendet werden. Wasserfahrzeuge lassen sich beim Personen- und Güterverkehr auf hoher See, auf Binnengewässern oder für Logistikketten, die Wasserstraßen miteinbinden, einsetzen. Hierzu gehört auch das Ausheben von Wasserfahrstraßen sowie das autonome Vermessen von Fahrrinnen.


{kind=link}
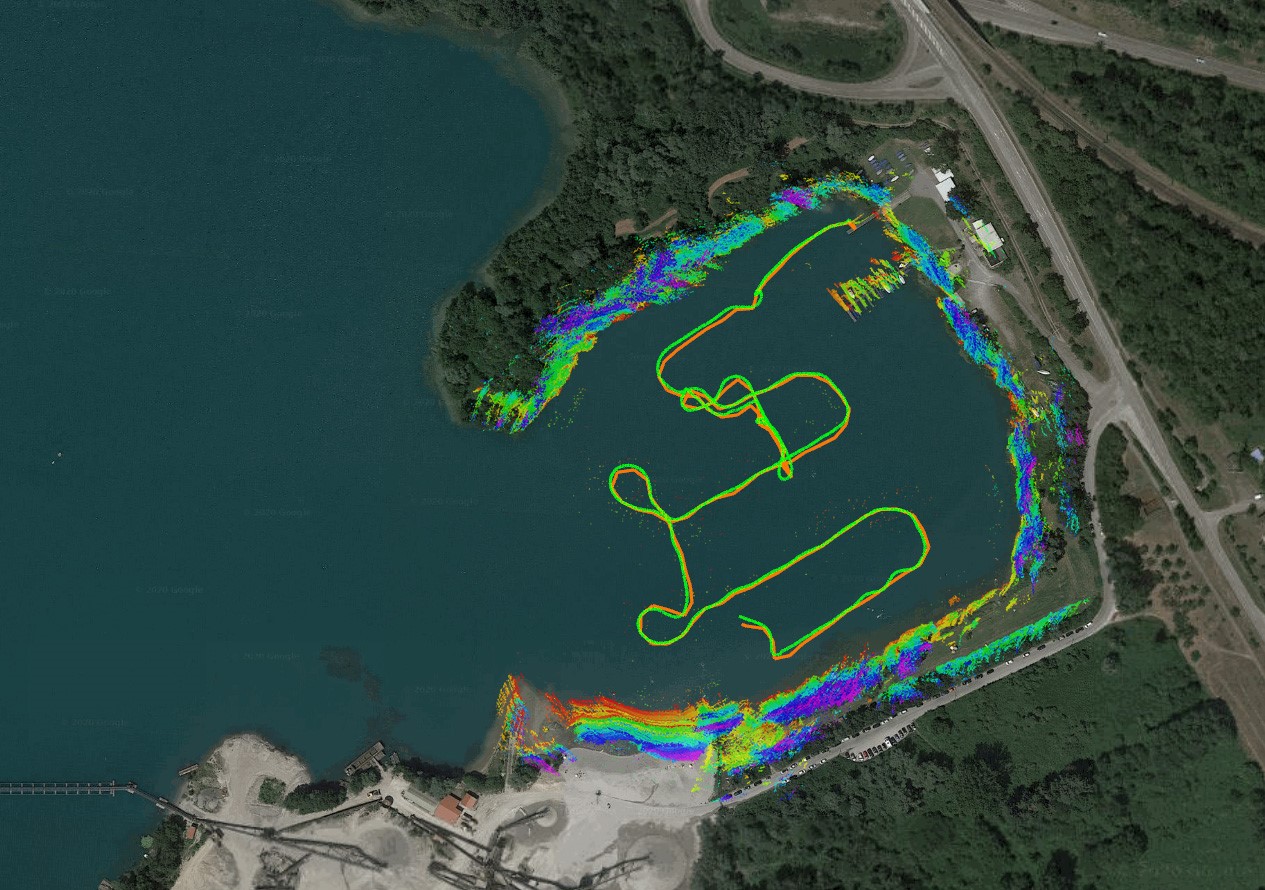
![Überwasserkarte basierend auf Kameradaten [ PNG 1,25 MB ]](/content/dam/iosb/iosbtest/bilder-videos/projekte/tep-taps/Überwasserkarte2.png){kind=link}